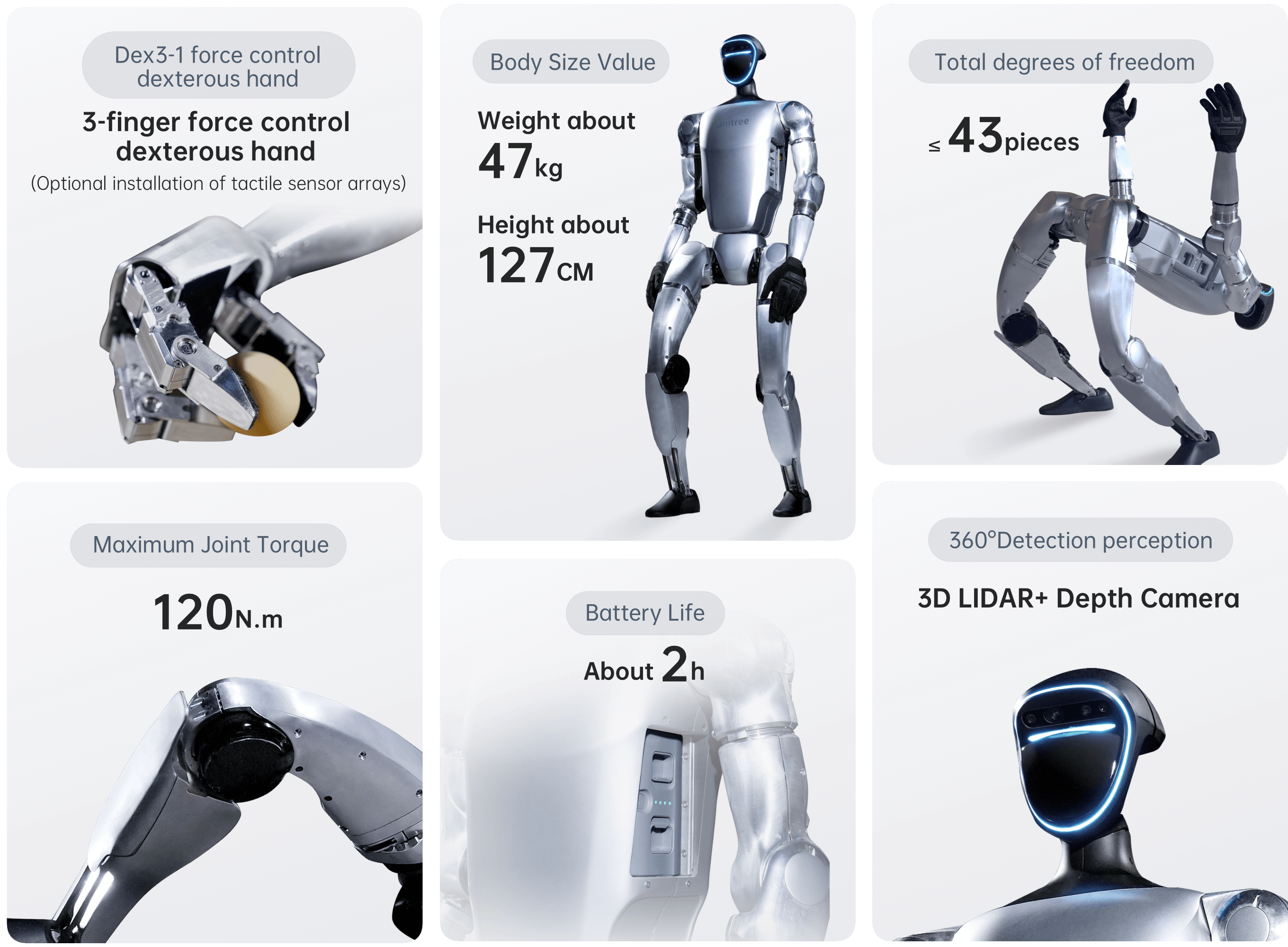
Der Unitree G1 ist ein hochmoderner humanoider Roboter, der durch seine bemerkenswerte Bewegungsfreiheit und hochentwickelte Technologie beeindruckt. Mit einer außergewöhnlich großen Gelenkbeweglichkeit und – je nach Version – bis zu 43 angetriebenen Freiheitsgraden übertrifft er die Mobilität eines durchschnittlichen Menschen deutlich.
Durch den Einsatz von Imitationslernen und Reinforcement Learning entwickelt der Roboter seine Fähigkeiten kontinuierlich weiter und verbessert so fortlaufend seine Leistungsfähigkeit im Bereich künstlicher Intelligenz.
Ein besonderes Highlight ist die Fähigkeit des G1, sich eigenständig aus der Bodenlage in den Stand zu bringen. Ohne externe Hilfe richtet er sich auf und ist sofort wieder einsatzbereit.
Hinweis: Diese Funktion steht nicht zur Verfügung, wenn der Roboter mit Händen ausgestattet ist.
Der G1 kann mithilfe des VirDyn Full Suit intuitiv und präzise gesteuert werden. Durch die Erfassung der menschlichen Bewegungen in Echtzeit überträgt der Anzug die Kinematik des Nutzers direkt auf den Roboter. So lassen sich komplexe Bewegungsabläufe, Greifprozesse und Interaktionen natürlich und ohne aufwendige Programmierung ausführen.
Diese Form der Teleoperation ermöglicht eine besonders schnelle Inbetriebnahme sowie flexible Einsatzmöglichkeiten, etwa in Forschung, Training von KI-Modellen oder bei anspruchsvollen Manipulationsaufgaben. Gleichzeitig sorgt die hochauflösende und latenzarme Datenübertragung für eine stabile und synchrone Umsetzung der Bewegungen zwischen Mensch und Maschine.
Die Basic Version des Unitree G1 dient in erster Linie als eindrucksvolles Demonstrations- und Showmodell. Sie eignet sich hervorragend, um die beeindruckende Bewegungsperformance, Stabilität und Dynamik des Roboters live zu präsentieren – ganz ohne Programmieraufwand.
Wer jedoch wirklich in die Tiefen der Robotik-Forschung eintauchen möchte, setzt auf die EDU-Versionen:
Erst diese Varianten sind vollständig programmierbar und bieten eine offene Entwicklungsplattform sowohl für High-Level- als auch Low-Level-Steuerung. Dadurch werden eigene Bewegungsabläufe, Custom-Kontrollalgorithmen und komplexe KI-Funktionen möglich.
Alle EDU-Modelle verfügen über eine integrierte NVIDIA Orin NX 16GB Recheneinheit, die enorme Leistungsreserven für Echtzeit-KI, Wahrnehmungsalgorithmen und maschinelles Lernen bereitstellt.
G1 Produktvarianten – Übersicht
| Modell |
Beschreibung |
Freiheitsgrade |
| G1 Basic – Einstieg |
Kompakt, robust und sofort einsatzbereit. Ideal für erste Anwendungen ohne Programmierung. |
23 |
| EDU-U1 – Programmierbarer Einstieg |
Mit NVIDIA Orin NX (100 TOPS) und voller Entwicklungsumgebung für KI und Robotik. |
23 |
| EDU-U2 – Erweiterte Forschung |
Erhöhte Beweglichkeit mit 7 DOF Armen und 3 DOF Taille für komplexe Anwendungen. |
29 |
| EDU-U3 – Greifen (Basis) |
2× Dex3-1 dreifingerige Greifer (ohne Sensorik). |
43 |
| EDU-U4 – Greifen (präziser) |
3-Finger Greifer mit taktiler Sensorik. |
43 |
| EDU-U5 – Feinmanipulation |
2× 5-Finger Dexterity Hände. |
41 |
| EDU-U6 – High-End |
5-Finger Hände mit 17 Sensoren pro Hand. |
41 |
| EDU-U7 – Performance |
Revo 2 Basic Hände. |
41 |
| EDU-U8 – Kompakt |
3-Finger Greifer. |
37 |
| EDU-U9 – Kompakt + Sensorik |
3-Finger mit 33 Sensoren. |
37 |
| EDU-U10 – Kompakt + 5-Finger |
Revo 2 Basic Hände. |
35 |
Spezifikation
| Spezifikation |
G1 Base |
G1 Standard Version |
G1 Advanced Version |
| Abmessungen (stehend) |
1270 × 450 × 200 mm |
1270 × 450 × 200 mm |
1270 × 450 × 200 mm |
| Abmessungen (gefaltet) |
690 × 450 × 300 mm |
690 × 450 × 300 mm |
690 × 450 × 300 mm |
| Gewicht |
ca. 35 kg |
ca. 35 kg+ |
ca. 35 kg+ |
| Freiheitsgrade |
23 |
23–43 |
23–43 |
| Programmierung |
Nein |
Ja |
Ja |
| Betriebsdauer |
ca. 2 h |
ca. 2 h |
ca. 2 h |

Lieferumfang
- Unitree G1 (je nach Version)
- Controller
- 9.000 mAh Akku










